Bio
Venture-backed AI startup founder. We are a team of AI pioneers from top AI labs (Google X + Brain, Unity, BAIR) inventing a new type of AI capable of superhuman spatial reasoning by building a cognition-inspired world model. Want to learn more? Email me at tony@tera.earth.
Prior, I was a Machine Learning Lead at Google X for a project in geospatial AI. My team of researchers developed novel AI models and algorithms for solving a range of problems, including sensing, prediction, and optimal control, and explored commercial opportunities. We collaborated with leading academic labs.
Before that, I obtained my PhD from the Caltech Computer Vision Lab, where I was advised by Pietro Perona and collaborated with Meister Lab. I was obsessed with replicating the general spatial reasoning capabilities of real brains in machines. This involved topics spanning graph search and neural theory, including computer vision, reinforcement learning, and theoretical neuroscience.
Previous to Caltech, I worked with various organizations internationally in advancing environmental policy, including the WHO, and theoretical neuroscience, as a Loran Scholar.
News
7/2023: I left Google X to invent a new type of AI capable of spatial reasoning, a dimension sorely lacking in foundation models today.
5/2022: Our new bumble bee behavior paper, the result of a collaboration between Google X and the Crall Lab, is published in Springer’s Artificial Life and Robotics.
11/2021: I defended my PhD thesis and will be starting full-time at X in Jan 2022.
9/2021: Our latest preprint proposing a new theoretical model for sequential learning in mapping and navigation is out on arxiv.
9/2021: I’ll be in Ann Arbor from 9/30 - 10/2 for an invited talk about our recent maze work at the Annual Meeting of the Pavlovian Society.
8/2021: Caltech featured our research on the homepage! Read the story or watch the interview to learn more about the inspirations behind the work.
7/2021: Our paper on fast sequential learning has been published in eLife.
1/2021: Our first full report characterizing and modeling few-shot learning and efficient exploration in a complex hierarchical maze is out on arxiv.
9/2020: I’ve returned to Caltech full-time while remaining the ML Lead for a Google X project part-time.
6/2020: I joined Google X as a AI Resident, continuing work on ML for behavior with multiple modalities.
10/2019: Our work on rapid learning and intrinsic motivated exploration in complex maze environments for mice has been accepted to the NeurIPS Biological and Artificial Reinforcement Learning workshop
3/2019: I presented our work on automated training and iterative latent strategy inference at the SoCal Machine Learning Symposium
Publications
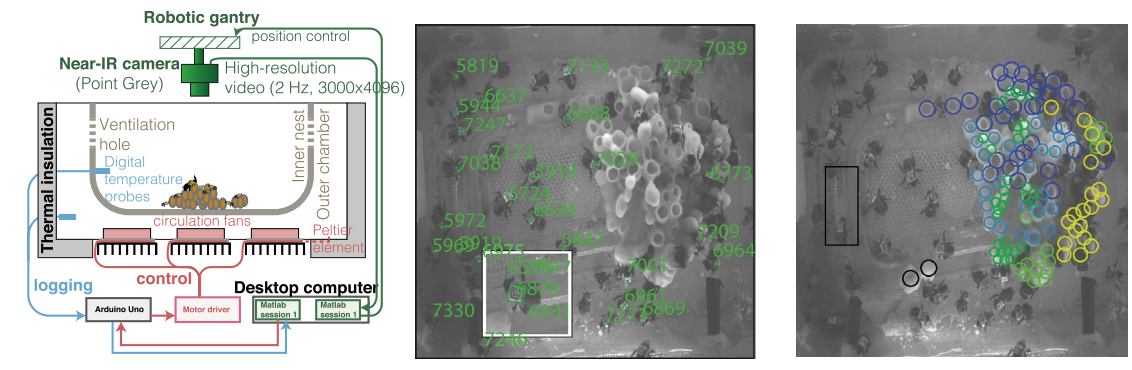
Long-term tracking and quantification of individual behavior in bumble bee colonies
Matthew Smith, August Easton-Calabria, Tony Zhang, et al. 2022.
[Artificial Life and Robotics] [DARS-SWARM 2021]
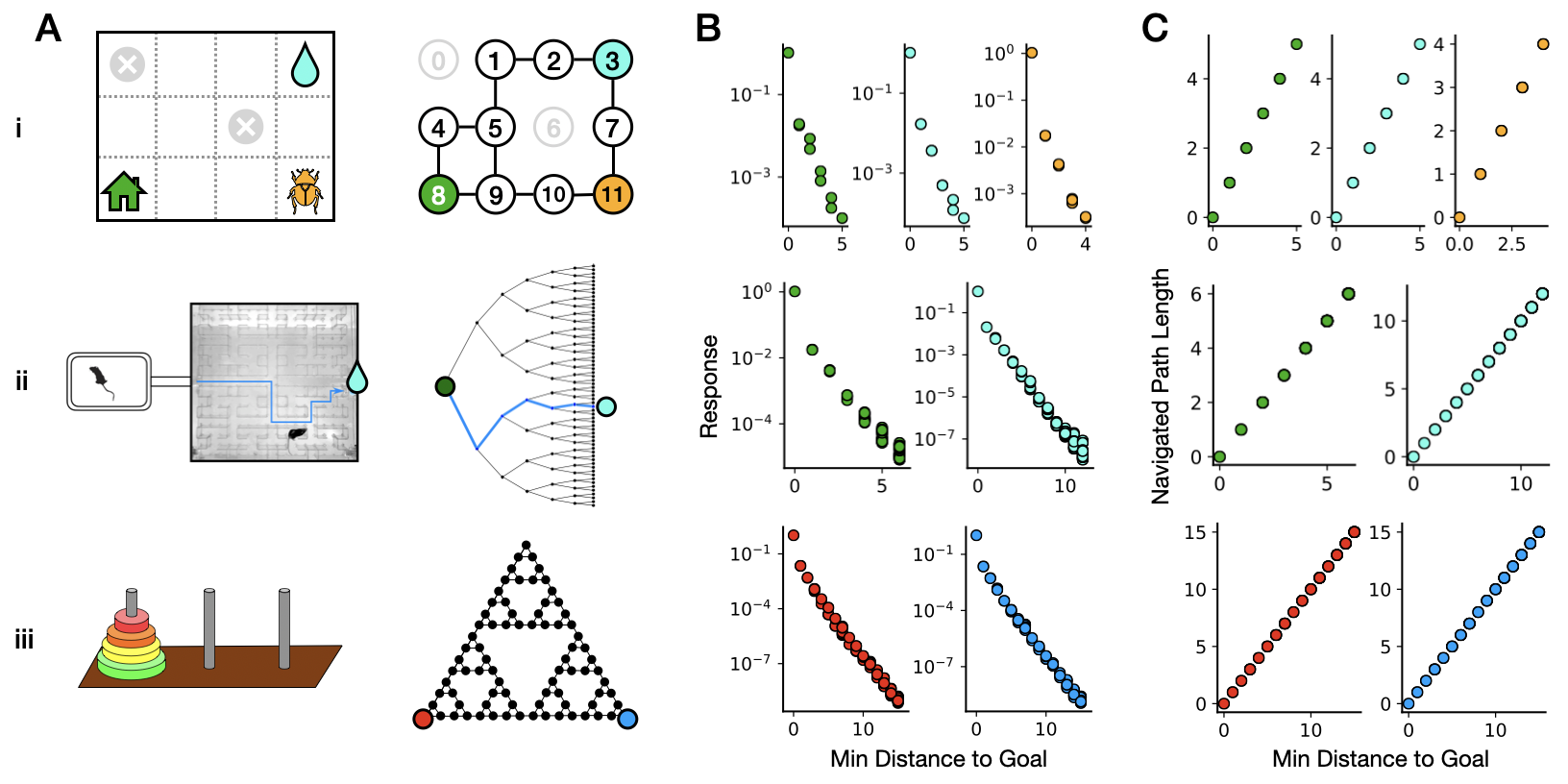
Endotaxis: A Universal Algorithm for Mapping, Goal-Learning, and Navigation
Tony Zhang, Matthew Rosenberg, Pietro Perona, Markus Meister. 2021.
[Arxiv]
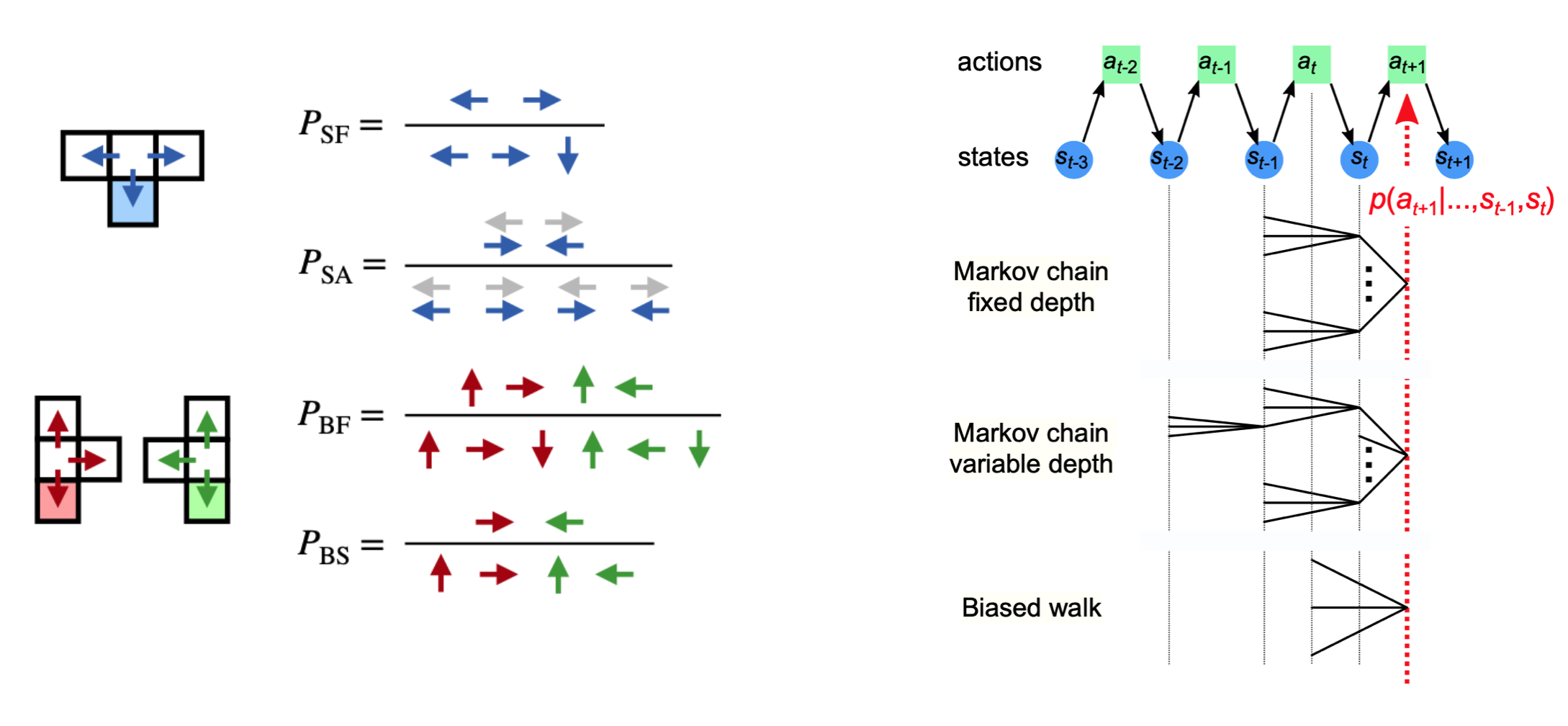
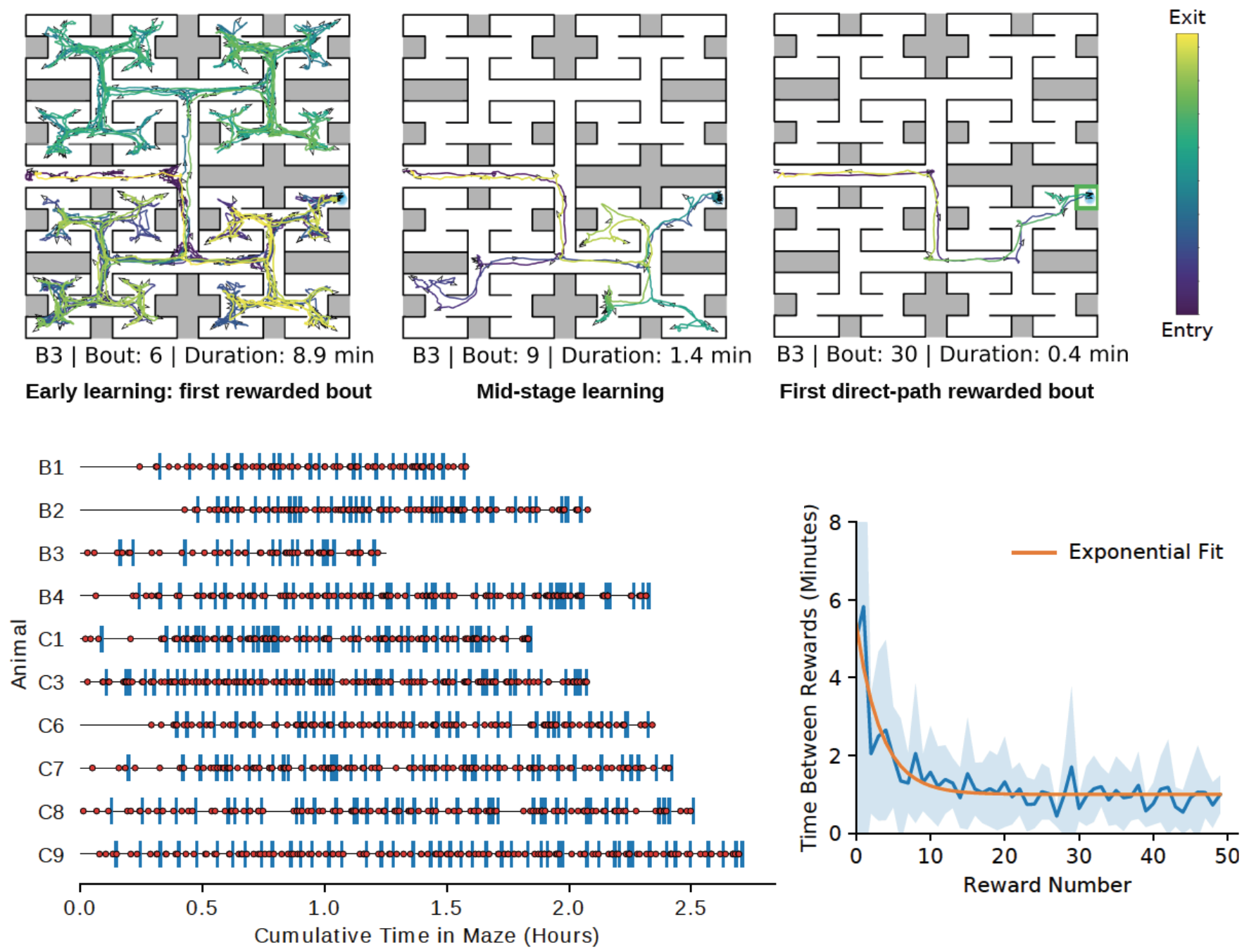
Mice in a labyrinth: Rapid learning, sudden insight, and efficient exploration
Matthew Rosenberg*, Tony Zhang*, Pietro Perona, Markus Meister. 2021.
[eLife] [Arxiv]
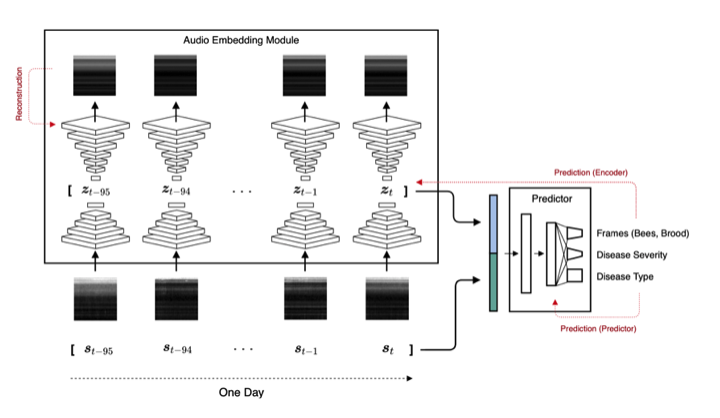
Semi-Supervised Audio Representation Learning for Modeling Beehive Strengths
Tony Zhang, Szymon Zmyslony, Sergei Nozdrenkov, Matthew Smith, Brandon Hopkins. 2021.
[Arxiv]
Rapid learning and efficient exploration by mice navigating a complex maze
Matthew Rosenberg*, Tony Zhang*, Pietro Perona, Markus Meister. 2019.
[NeurIPS Bio & Artificial RL]
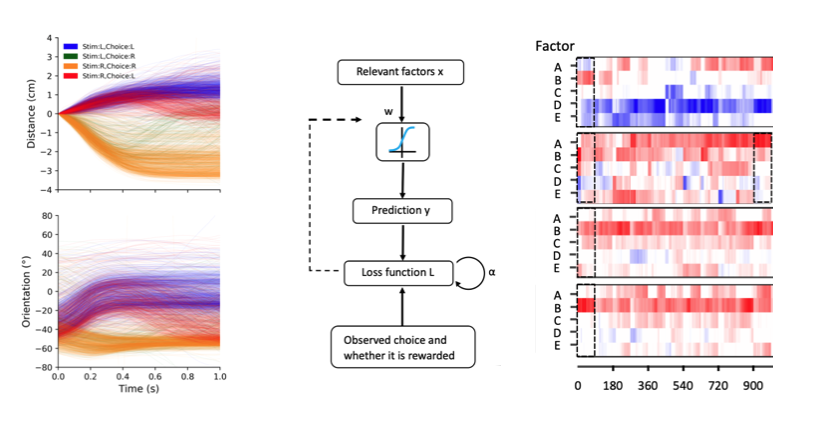
Mouse Academy: high-throughput automated training and trial-by-trial behavioral analysis during learning
Mu Qiao, Tony Zhang, Cristina Segalin, Sarah Sam, Pietro Perona, Markus Meister. 2018.
[SoCal ML Symposium ‘19] [Arxiv]